
Up until the last decade, there was still a 20% dissatisfaction rate among people with artificial knee joints. Kinematic alignment was therefore developed as an alternative to the classic mechanical alignment (alignment of the artificial knee joint along the mechanical axis of the leg). In kinematic alignment, the artificial knee joint is fitted along the individual leg axis.
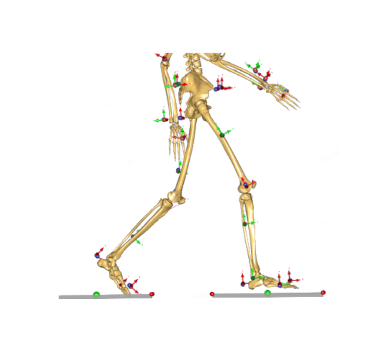
The aim of this research project is to investigate the two surgical techniques with regard to the functional outcomes of patients. To this end, gait analyses will be carried out preoperatively and one and five years postoperatively on patients who have undergone either mechanical or kinematic alignment surgery.

Current prosthetic hands based on robotic functions are still very expensive, technically far too fragile and virtually impossible to control intuitively. For these reasons, they have not yet found widespread technical application in arm prosthetics. As a rule, arm prostheses are either only cosmetic replicas of the lost limb or they only offer greatly simplified functions compared to the human hand.
In order to change this, the SoftPro research project aims to bring together and further develop available robot technologies in an open network of excellence in Europe. It is being funded with €7.4 million from the European Union's Horizon 2020 research and innovation program.
The six pillars of the research project are sensorimotor synergies from neuroscience, human-robot interaction from robot technology, the functional simplification of everyday hand movements for their prosthetics, new strategies for assessing the progress of treatment of arm amputees, the development of jointly usable open-source sources for bringing together the know-how of developers and users, and the close integration of research centers with clinical institutions and industry. Further information can be found on the project website .
Misalignments of the knee axis lead to uneven loading of the knee joint and are associated with increased degeneration of the joint compartment. In patients with existing residual growth, growth control is an efficient therapy. Occasionally, a rebound effect (recurrence of the deformity) occurs with this treatment.
Movement analyses before and up to 12 months after completion of therapy are used to investigate the influence of dynamic loads during walking on the rebound effect after surgical growth control.
The aim is to evaluate the causes of the rebound effect in order to gain insights into the optimal time for implantation and the optimal indication for explantation.